AI+自动化赋能类器官疾病建模与药物筛选
詳細を確認してください-
 記事 · 2025年27月18日
記事 · 2025年27月18日自动移液工作站,精准与自动化的完美结合
全文を読んでください -
記事 · 2025年22月18日
自动移液工作站工作原理及使用
全文を読んでください -
記事 · 2025年37月17日
自动移液工作站在生物工程领域的广泛应用
全文を読んでください
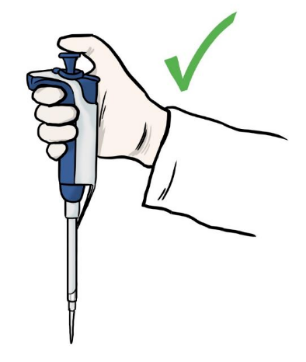
科学的実験とバイオテクノロジーの広大な分野では、微量液体の正確な移動のための重要なツールとしてのピペットの重要性は自明です。それが分子生物学、細胞培養、薬物開発、環境監視であろうと、ピペットの正確な使用は、実験の成功の基礎です。そして、これらすべての始まりは、ピペットの正しいグリップを習得することです。正しいグリップ方法は、操作の精度を改善するだけでなく、実験エラーを効果的に減らし、データの信頼性を確保することもできます。
1。準備段階1。ピペットモデルと範囲を確認します。最初に、実験的ニーズに応じて適切なピペットモデルと対応する範囲を選択します。ピペット銃の異なるモデルには、グリップスタイルと操作がわずかに異なる場合があるため、事前にそれらに精通する必要があります。 2。ピペットのステータスを確認します。ピペットに損傷の外観、柔軟なボタン、クリアで読み取り可能な範囲がなく、内部の残留液体や不純物がないことを確認してください。
2。手順1を把握します。4本の指を保持します。(1)インデックス、中央、リング、小さな指を使用して、ピペットのハンドルの一部をしっかりと保持します。この部分は通常、指を握ることを促進するために厚くなるように設計されています。 (2)指を自然に曲げて、手の快適さと柔軟性を維持するために過度の力を使用しないでください。 2。親指を指定します位置:(1)ピペットの制御ボタンに親指を静かに置きます。このボタンは、液体の吸収と放出を制御するための鍵です。 (2)親指が、過度の力や手首をひねることなく、ボタンを簡単に押して放すことができることを確認してください。 3。全体的な調整:(1)手の位置を調整して、ピペットと手のひらの間に自然な角度を形成します。この角度は、ピペッティングプロセス中に手がピペットを安定して制御できるようにするために、大きくも小さくもないはずです。 (2)ピペッティングプロセス中に不必要な揺れを避けるために、手首と腕をリラックスさせてください。
3。操作の注意事項1.垂直に保つ:液体を吸うときは、ピペットが垂直のままであることを確認して、ピペットのボリュームが大きすぎたり小さすぎたりするように傾斜しないようにします。 2。スプレーチップ挿入深さ:ピペットチップ挿入の深さは、一般に2〜3 mm(またはピペットの種類によって異なる)中程度でなければなりません。過度の浅さと過度の深さを避けて、液体が吸引頭の外壁にとどまるようにします。 3.ゆっくりと均一な動作:液体を吸収して放出する場合は、ゆっくりと均一に動作して、速すぎたり遅すぎたりして不正確なピペットを避けます。 4。吸引前の頭:水とは異なる粘性または密度で液体を吸収する場合、まず液体を吸収して数回配置して、液体吸収ノズルを湿らせ、ピペットの精度を改善できます。 5。吸引ヘッドを時間内に交換します。各使用後、相互汚染を避け、ピペッティングの精度に影響を与えるために、新しい吸引ヘッドを時間内に交換します。
この記事の詳細な紹介の後、ピペットの正しいグリップは実験操作の基本的なスキルであるだけでなく、実験データの精度と信頼性を確保するための重要なリンクでもあることを明確に理解できます。適切な保持方法は、科学的研究と探査の旅において着実に前進し、運用上のエラーによって引き起こされるエラーと後悔を効果的に削減するのに役立ちます。
関連する読書の推奨事項
ot-2液体治療ロボットの安全性および規制コンプライアンス情報
opentrons Flex fell flex fell Automatic Pipettingワークステーション操作インターフェイス

経験豊富なサービスチームと強力な制作サポートチームは、顧客に心配のない注文サービスを提供します。

简体中文

繁體中文

English