Flex应用专题 | 解锁蛋白质谱前处理自动化的无限潜能
看詳情-
 文章 · 2025年3月9日
文章 · 2025年3月9日清洗微孔板的具体步骤是什么
閱讀全文 -
文章 · 2025年56月8日
磁珠分选是什么
閱讀全文 -
新聞稿 · 2025年40月8日
云端相约 | 邀您共同解锁蛋白质谱前处理自动化无限潜能
閱讀全文
移液機械手臂是一種高度自動化的液體處理裝置,透過精確控制機械手臂的運動和操作,實現液體的吸取、轉移和釋放。它能夠取代傳統的移液工具,自動完成梯度稀釋、移液、合併液體等高精度的液體處理任務,並可與檢測儀器聯用,實現對目標物的高效精確檢測。
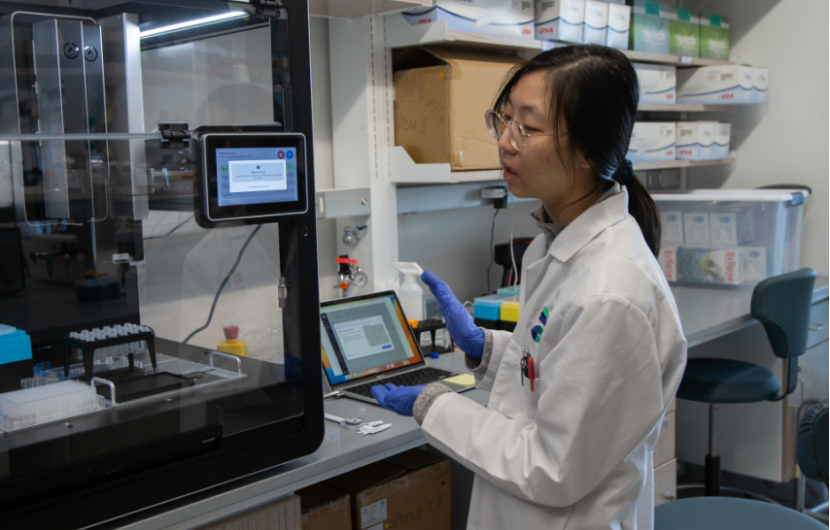
一、移液機械手臂的組成結構1、控制系統:負責控制機械手臂的移動和操作,通常採用電腦或自動控制系統進行控制,確保操作的精確性和穩定性。 2.移液頭:位於機械手臂末端,用於吸取和釋放液體。移液頭通常包含吸管和注射器,透過改變其內部壓力來實現液體的吸取和釋放。 3.軌道系統:用於支撐和導向機械手臂的運動,確保其穩定性和準確性。軌道系統能夠確保機械手臂在三維空間內精確定位到目標位置。 4.感測器:用於偵測液體的位置、容量和壓力等參數,以便控制系統根據需要調整移液頭的運動和操作。感測器提高了操作的智慧化和自動化程度。
二、移液機械手臂的工作原理1、定位:透過軌道系統將移液頭定位到需要進行液體處理的位置,如試管、孔板或微孔板等容器。 2.吸取:移液頭下降到目標液體上方,藉由改變移液頭內部的壓力差(通常是負壓),使液體進入吸管中。 3.運輸:移液頭將吸取的液體帶到目標位置(即釋放液體的地方)。在運輸過程中,控制系統根據需要調整移液頭的運動路徑和速度,以確保液體的準確傳遞。 4.釋放:移液頭到達目標位置後,改變其內部壓力差(通常是正壓),使液體從注射器中釋放出來。
三、移液機械手臂的精度控制1、機械結構設計(1)高精度零件:採用高精度的軸承、齒輪、導軌等機械零件,以減少摩擦、提高剛性和穩定性,進而改善機械手臂的運動精度。 (2)減震裝置:安裝減震裝置以減少機械振動對精度的影響,確保機械手臂在運作過程中的穩定性。 (3)合理佈局:優化機械手臂的佈局和結構設計,以減少不必要的運動部件和重量,提高整體的運動精度和響應速度。 2.傳動系統最佳化(1)精密傳動元件:使用精密齒輪箱、高精度皮帶等傳動元件,以提高傳動系統的精確度與穩定性。 (2)對齊度調整:定期檢查並調整傳動元件(如齒輪、皮帶和鏈條)的對齊度,確保傳動過程中的順暢和準確。 (3)磨損零件更換:及時更換磨損的傳動零件,避免因零件磨損導致的精度下降。 3.控制系統最佳化(1)高精度感測器:使用高精度的感測器來獲取準確的位置和力訊息,為控制系統提供精確的回饋數據。 (2)先進控制演算法:採用自適應控制、模糊控制等先進控制演算法,以更好地控制機械手臂的運動軌跡和速度,提高控制精度。 (3)高性能控制器和致動器:選用高性能的控制器和執行器,確保控制訊號的準確性和響應速度,進而提高機械手臂的整體精度。 4.校準與驗證(1)定期校準:根據偵測到的精確度偏差數據,對機械手臂進行定期校準,修正關節角度與末端執行器位置之間的關係。 (2)運動軌跡優化:重新檢視並優化機械手臂的運動軌跡編程,確保運動軌跡平滑、合理,避免不必要的急停、急轉彎等動作,減少因運動不平穩導致的精確度誤差。 (3)精度驗證:在完成調整後,定期對機械手臂的精度進行驗證,建立精度監測的標準和流程,確保機械手臂在生產過程中保持穩定的精度。 5.環境因素控制(1)溫度控制:維持機械手臂工作環境的溫度穩定,避免因溫度變化而導致的機械部件熱脹冷縮現象,進而影響精度。 (2)減震防塵:採取必要的避震防塵措施,減少震動和灰塵對機械手臂正常運作的影響。
移液機械手臂作為現代實驗室自動化的重要工具之一,以其精確性、自動化、高效性和可擴展性等特點在多個領域發揮重要作用。隨著技術的不斷進步和應用需求的增加,移液機械手臂將繼續發展並創造更多的應用機會和發展前景。


經驗豐富的服務團隊和強大的生產支援團隊為客戶提供無憂的訂單服務。