-
 article · 2026Year13Moon30Day
article · 2026Year13Moon30Day自动化移液对实验室效率提升明显吗?
Read More -
article · 2026Year58Moon28Day
移液机器人可以实现高通量筛选吗?
Read More -
article · 2026Year11Moon27Day
Opentrons 实验数据安全如何保障?
Read More
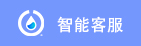
The pipetting robot arm is a highly automated liquid handling device that achieves the suction, transfer and release of liquids by precisely controlling the movement and operation of the robot arm. It can replace traditional pipetting tools and automatically complete high-precision liquid processing tasks such as gradient dilution, pipetting, and merging liquids. It can also be used in conjunction with detection instruments to achieve efficient and accurate detection of target substances.
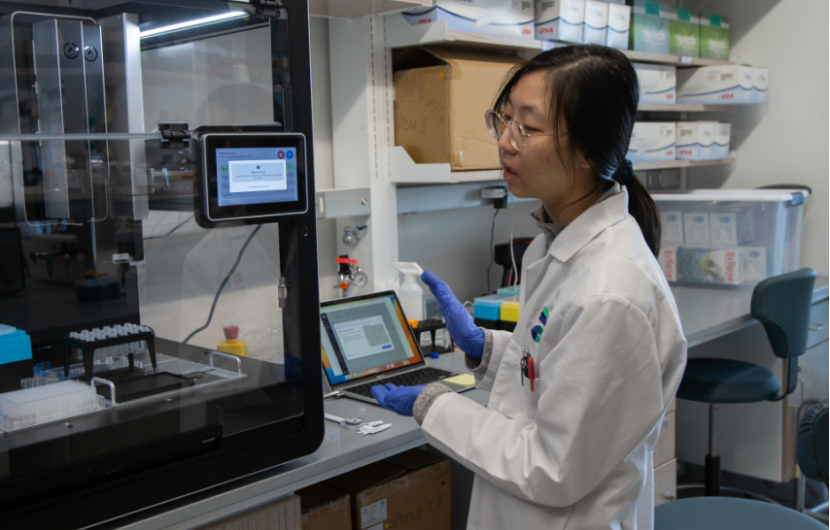
1. The structure of the pipetting robot arm 1. Control system: Responsible for controlling the movement and operation of the robot arm. It is usually controlled by a computer or automatic control system to ensure the accuracy and stability of the operation. 2. Pipetting head: Located at the end of the robotic arm, it is used to absorb and release liquids. The pipette head usually contains a pipette and a syringe, which changes the internal pressure to aspirate and release liquids. 3. Track system: used to support and guide the movement of the robotic arm to ensure its stability and accuracy. The track system ensures that the robotic arm is accurately positioned at the target location in three-dimensional space. 4. Sensor: used to detect parameters such as the position, volume and pressure of the liquid, so that the control system can adjust the movement and operation of the pipetting head as needed. Sensors improve the intelligence and automation of operations.
2. Working principle of pipetting robot arm 1. Positioning: Position the pipetting head through the track system to the location where liquid processing is required, such as test tubes, well plates or microplates and other containers. 2. Aspiration: The pipetting head is lowered above the target liquid, and the liquid enters the straw by changing the pressure difference (usually negative pressure) inside the pipetting head. 3. Transport: The pipetting head brings the sucked liquid to the target location (that is, the place where the liquid is released). During the transportation process, the control system adjusts the movement path and speed of the pipetting head as needed to ensure accurate delivery of liquid. 4. Release: After the pipetting head reaches the target position, it changes its internal pressure difference (usually positive pressure) to release the liquid from the syringe.
3. Precision control of the pipetting robotic arm 1. Mechanical structure design (1) High-precision components: Use high-precision bearings, gears, guide rails and other mechanical components to reduce friction, improve rigidity and stability, thereby improving the movement of the robotic arm Accuracy. (2) Shock absorbing device: Install a shock absorbing device to reduce the impact of mechanical vibration on accuracy and ensure the stability of the robotic arm during operation. (3) Reasonable layout: Optimize the layout and structural design of the robotic arm to reduce unnecessary moving parts and weight, and improve the overall movement accuracy and response speed. 2. Transmission system optimization (1) Precision transmission components: Use precision gearboxes, high-precision belts and other transmission components to improve the accuracy and stability of the transmission system. (2) Alignment adjustment: Regularly check and adjust the alignment of transmission components (such as gears, belts and chains) to ensure smooth and accurate transmission. (3) Replacement of worn parts: Replace worn transmission parts in a timely manner to avoid loss of accuracy due to component wear. 3. Control system optimization (1) High-precision sensors: Use high-precision sensors to obtain accurate position and force information and provide accurate feedback data for the control system. (2) Advanced control algorithm: Use advanced control algorithms such as adaptive control and fuzzy control to better control the movement trajectory and speed of the robotic arm and improve control accuracy. (3) High-performance controllers and actuators: Use high-performance controllers and actuators to ensure the accuracy and response speed of control signals, thereby improving the overall accuracy of the robotic arm. 4. Calibration and verification (1) Regular calibration: Based on the detected accuracy deviation data, the robotic arm is regularly calibrated to correct the relationship between the joint angle and the end effector position. (2) Motion trajectory optimization: Re-examine and optimize the motion trajectory programming of the robotic arm to ensure that the motion trajectory is smooth and reasonable, avoid unnecessary emergency stops, sharp turns, etc., and reduce accuracy errors caused by unstable motion. (3) Accuracy verification: After completing the adjustment, regularly verify the accuracy of the robotic arm, and establish accuracy monitoring standards and processes to ensure that the robotic arm maintains stable accuracy during the production process. 5. Environmental factor control (1) Temperature control: Keep the temperature of the working environment of the robotic arm stable to avoid thermal expansion and contraction of mechanical parts caused by temperature changes, thereby affecting accuracy. (2) Shock absorption and dust prevention: Take necessary shock absorption and dust prevention measures to reduce the impact of vibration and dust on the normal operation of the robotic arm.
As one of the important tools for modern laboratory automation, pipetting robotic arms play an important role in many fields with their accuracy, automation, efficiency and scalability. As technology continues to advance and application demands increase, pipetting robotic arms will continue to develop and create more application opportunities and development prospects.


The experienced service team and strong production support team provide customers with worry-free order services.

简体中文

繁體中文

English
日本語
한국인