Opentrons is excited to release an improved robot calibration experience. Here’s everything you need to know about how it will improve your work on the OT-2.
hello !
We've just released our next software update: 4.0.0. This update includes bug fixes and features, including:
New and improved robot calibration experience!
Opentrons is pleased to release a feature that will result in a more accurate and reliable OT-2 user experience. We have improved robot calibration and are proud to announce that we have overhauled deck calibration, tip length calibration, and pipette offset calibration. In this article, we'll outline the main changes we've made to robot calibration, explain what calibration means, and break down each calibration process in detail.
Main changes:
Here are the main changes we implemented to the improved OT-2 robot calibration:
We created 3 unique robot calibrations: deck calibration, tip length calibration, and pipette offset calibration. Since these are now 3 separate processes, you'll be able to troubleshoot issues more easily.
We removed the Tip Probe from the pre-protocol process and replaced it with the more accurate Tip Length and Pipette Offset Calibration process.
We created a calibration block to make tip length calibration easier and more accurate. If you don't have one yet, request one here , along with a removable black plastic bin.
We've made the robot calibration data publicly available via a download link to make it easier for support to diagnose any issues that arise.
If you created position adjustments in the protocol or labware calibration, you will need to recalibrate the labware and adjust the protocol code to eliminate any position adjustments.
What does calibration mean?
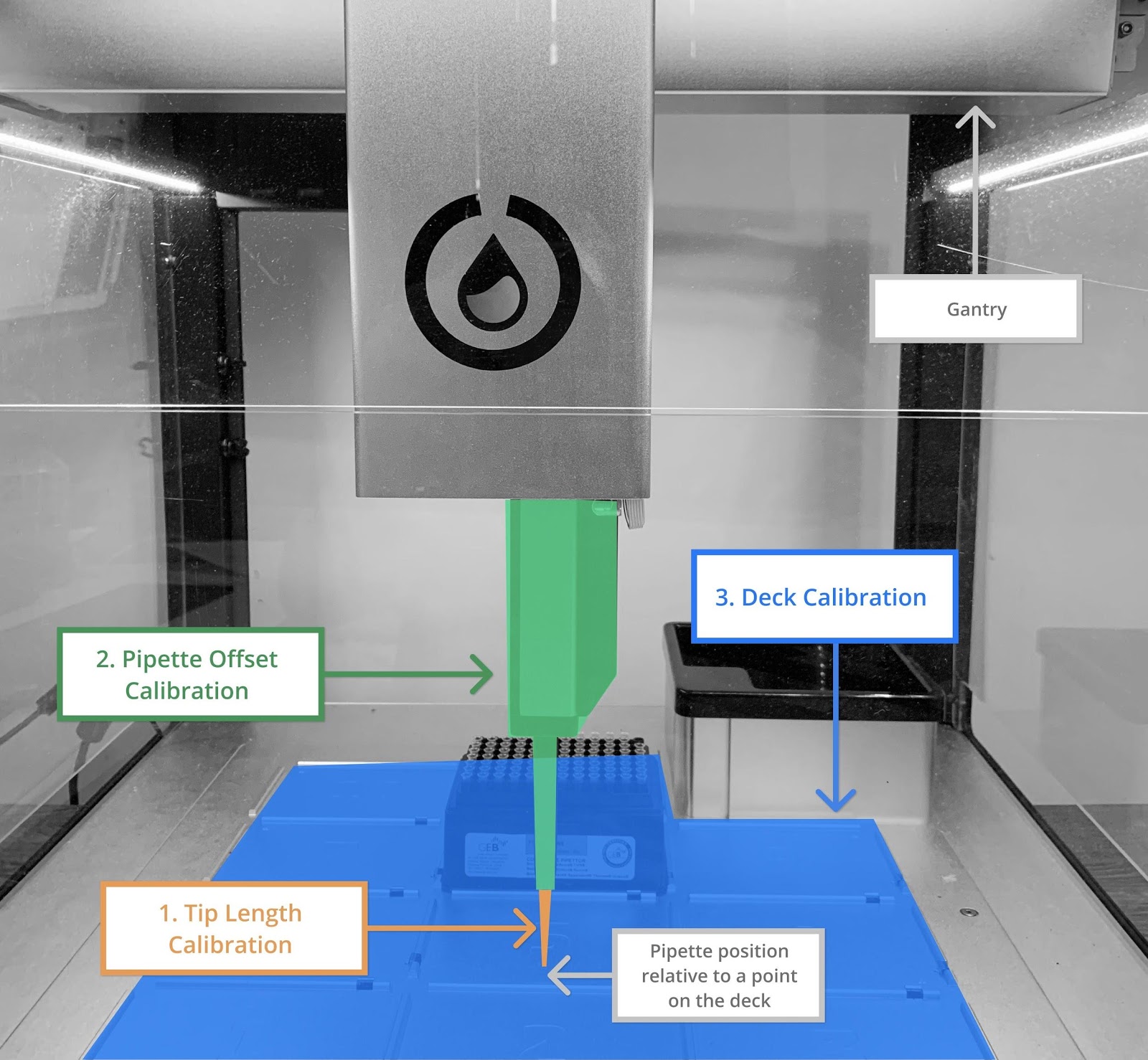
When we describe the calibration of the OT-2, it refers to the precise positioning of the robot's pipette to a certain point or location on the platform. We’ve improved the OT-2’s calibration system for a more accurate, reliable, and consistent pipetting experience. To achieve this goal, we designed a three-step process: tip length calibration, pipette offset calibration, and platform calibration. We'll detail how this 3-step process improves your robot's pipetting operations run after run.
Deck setting illustration.
3-step calibration process broken down
1. Deck Calibration
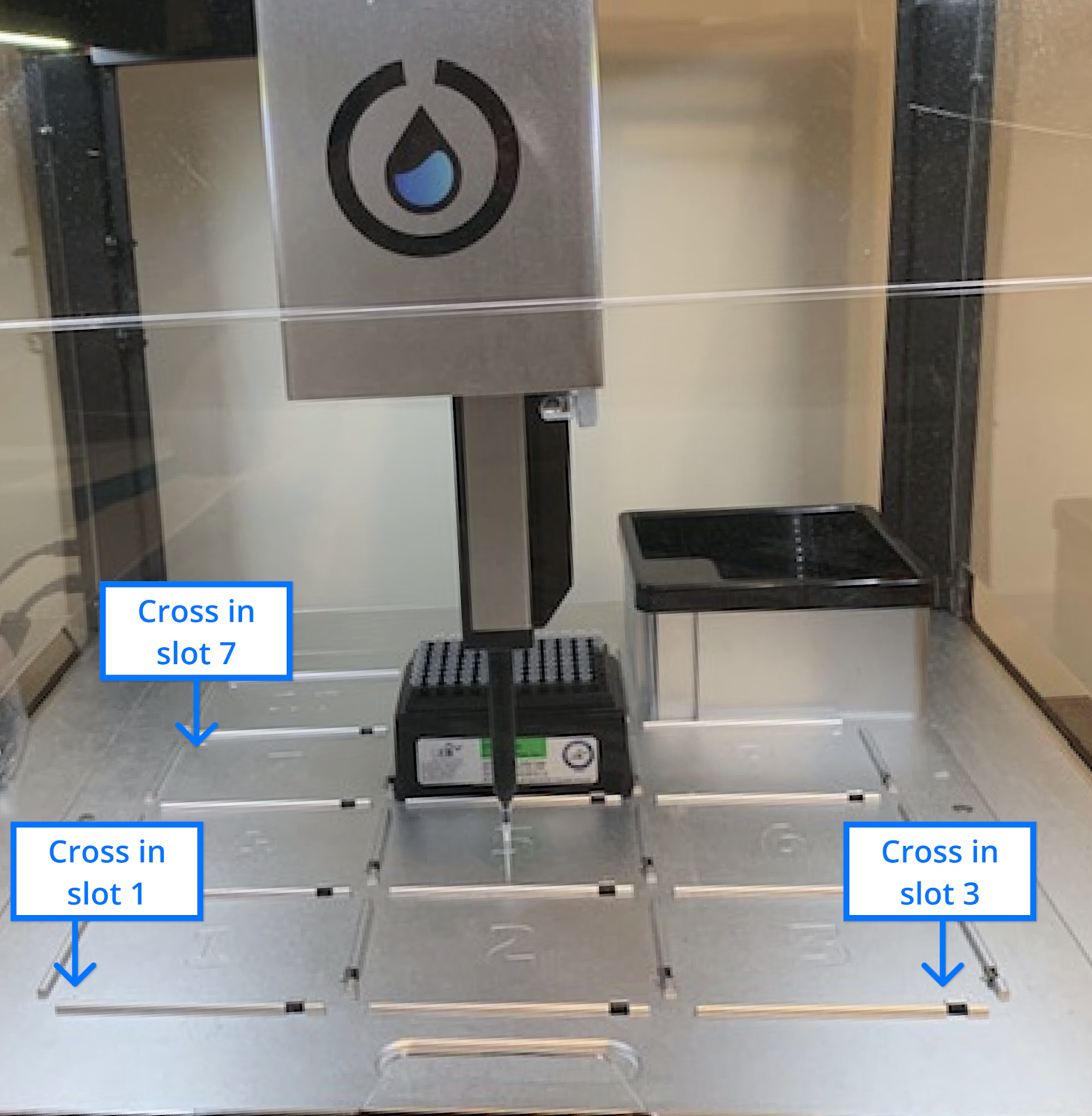
Users calibrate their platform to ensure that the gantry (the rod that moves the pipette) moves accurately to any point on the robotic platform. You only need to perform deck calibration when you unpack a new robot, physically move the robot, or a calibration health check recommends recalibration.
You can calibrate your deck by picking up tips and slowly pushing the robot to the crosses in slots 1, 3, and 7.
Important note about legacy deck calibration: When updating to 4.0, deck calibration data from the previous system will be migrated, but it is highly recommended to recalibrate your decks using this new process.
You can calibrate the platform by nudging the pipette over the crosses in slots 1, 3, and 7.
2. Tip length calibration
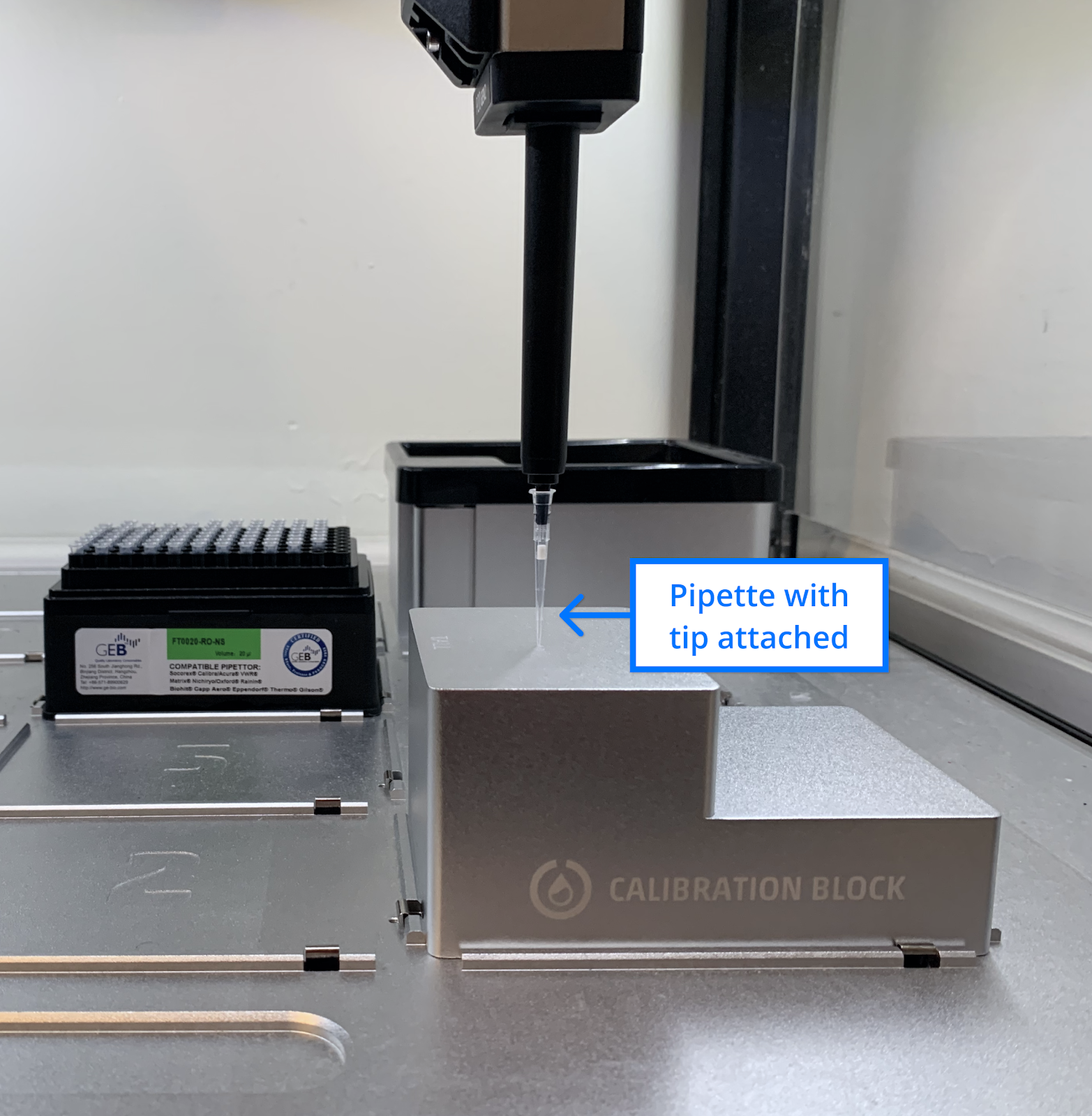
Tip length calibration calculates the length of a specific tip from the end of the pipette nozzle to the end of the tip. This ensures accurate movement of the pipette in the Z-axis (down to the platform of the OT-2). Due to subtle manufacturing differences between pipettes, tip length calibration needs to be performed for each tip model and for each individual pipette. You will perform tip length calibration when calibrating a new pipette, or as part of a pre-protocol experience.
Some pipettes cannot reach the robot's platform when the tip is not attached, so we created calibration blocks to help. If you don't have one, you can apply here. Using a calibration block during tip length calibration is ideal, but if you don't already have a calibration block, you can use a flat surface on a removable black plastic trash can.
Important note about old tip length calibration: Previously, you needed to use the tip probe tool under the trash can lid to calibrate tip length as part of the pipette calibration process. When you update to 4.0, this measurement will not migrate. Before running the protocol, you need to calibrate the tip length using the new procedure for each pipette
You can calibrate tip length by shaking the exposed nozzle and then the nozzle with the tip attached to the calibration block.
3. Pipette offset calibration
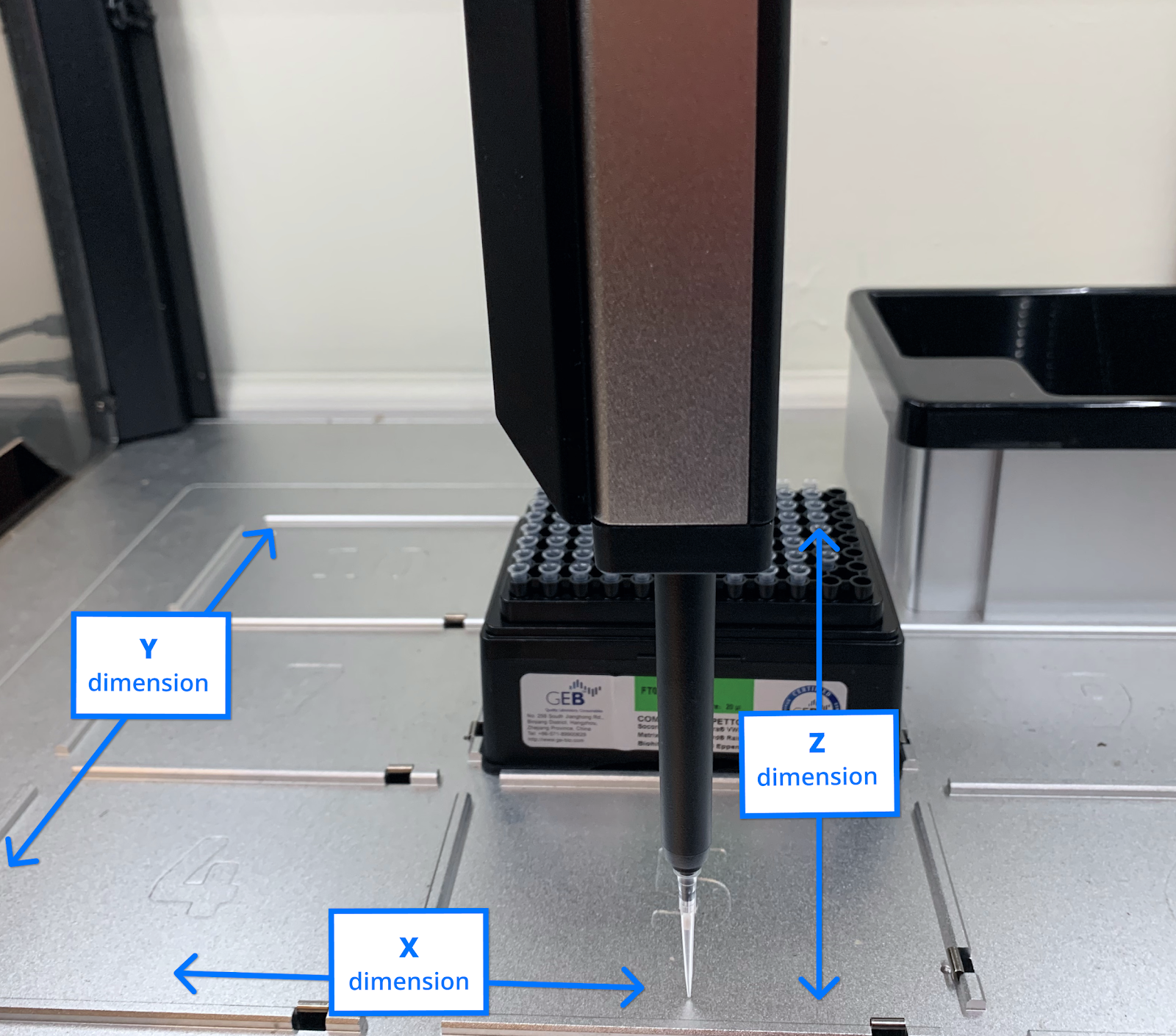
The user will perform pipette offset calibration for each unique pipette connected to a specific mount. This calibration calculates the X, Y, and Z position of the pipette relative to the robot platform. Because there are subtle manufacturing differences between pipettes, it is important to calibrate each unique pipette for each specific mount.
Example: If you mount the P20 Single GEN2 on the left-hand mount, you will perform a pipette offset calibration. If you move the pipette to the correct mount, you must perform the pipette offset calibration again. If you remove and reinstall the pipette into the left mount, you do not need to re-do the left mount pipette offset calibration.
Important note about legacy pipette calibration: Previously, you used the tip probe tool under the trash can lid to calibrate the pipette offset during pipette calibration. This measurement will not be migrated with this update. Before running a protocol, you need to calibrate the pipette offset of each connected pipette.
You can calibrate the pipette by nudging it into slot 5 and then aligning it with the cross in slot 5
If you require any additional information or instructions, please contact support@opentrons.com.


 article · 2025Year46Moon22Day
article · 2025Year46Moon22Day article · 2025Year35Moon22Day
article · 2025Year35Moon22Day article · 2025Year40Moon22Day
article · 2025Year40Moon22Day

